Работа Льва над проектом "Робоняша". Часть 3
26 октября 2016
Голова
Здравствуйте!
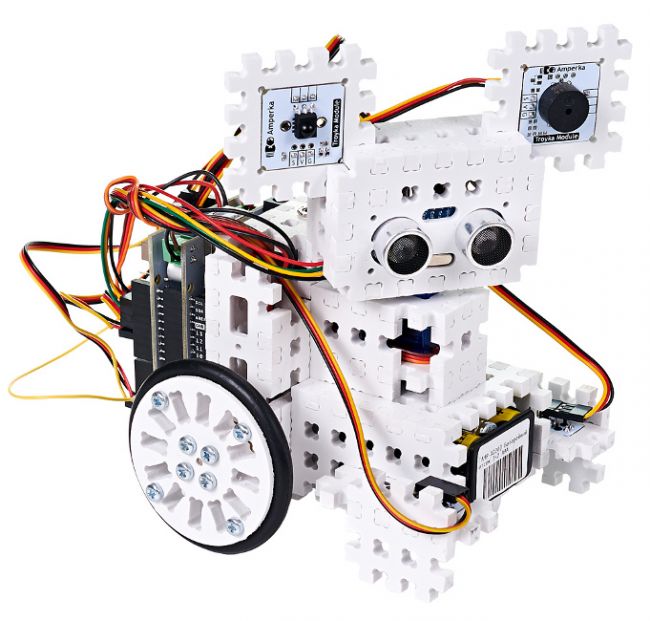
Это снова Лев. В этой статье я расскажу, как научил мою Мышь ввертеть головой.
Вы уже читали, что для поворотов головы в комплекте с #Робоняшей шёл микросервопривод. Я уже научился им управлять ещё с «Матрёшка Z». Тут я просто немного поэкспериментировал. Данный сервопривод «угловой». Он может вставать в любой из углов от 0 до 180 градусов. Мы подаём сигналы с ШИМ-порта с нужной длительностью, для упрощения пользуясь библиотекой Servo.
О моём микросервоприводе подробнее здесь.
Я закрепил серву на 11 порт (самый ближний порт с ШИМ). Я экспериментировал: подбирал такой угол, чтобы голова смотрела прямо.
Мой скетч:
#include //подключаем библиотеку для работы
Servo head; //объявляем объект класса Servo с именем head
void setup() {
head.attach(11); //с помощью этой функции прикрепляем привод к 11 пину
}
void loop() {
head.write(75);
//задаём команду встать в указанный угол (это – центр)
delay(3000);
head.write(105); //влево
delay(3000);
head.write(45); //вправо
delay(3000);
}
Как это выглядит (питание от компьютера)
Комментарии
(0) Добавить комментарий