Работа Льва над проектом "Робоняша". Часть 1
Здравствуйте!
Это снова Лев. Я писал о моделях, создаваемых из набора «Матрёшка Z» от Амперки. Теперь, когда у меня наконец-то появилось время на статьи, я начну рассказы о новом моём наборе – это «Робоняша», тоже от Амперки. Я задался целью «оживить» её.
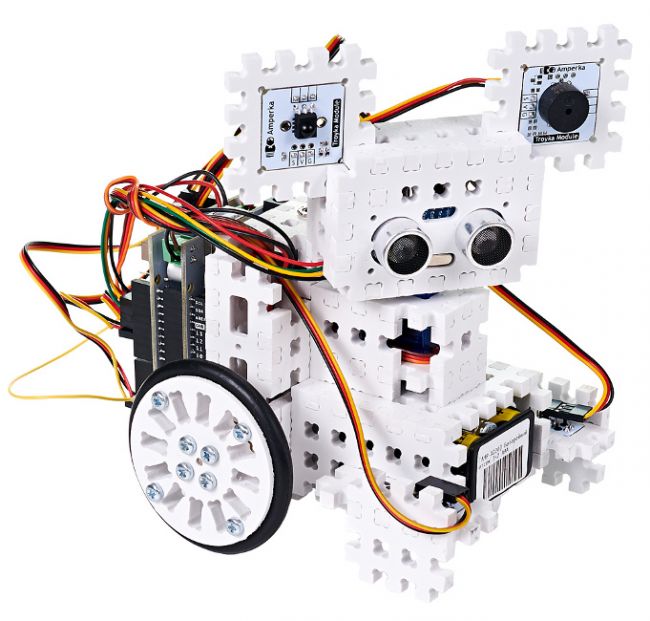
У мыши внутри батарейный блок (6*ААА), два мотора для колёс и один сервопривод.
Кроме того, из «Матрёшки» у меня есть Arduino Uno. Также понадобились Motor Shield (для моторов), Troyka Shield (серва и датчики), аналоговые датчики линии и ультразвуковой дальномер («глаза» с функцией определения расстояния до объекта).
Так выглядит корпус после сборки:

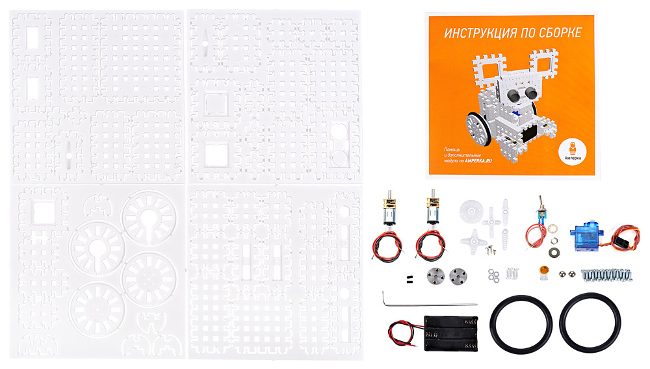
Это комплектация набора:
Есть одно но: у меня провода от моторов были коротки. Еле-еле получилось их провести, а в следующих наборах проблему вроде бы исправили.
Пока у меня нет проводов для «глаз» (их нет в комплекте). Поэтому я их ещё не поставил.
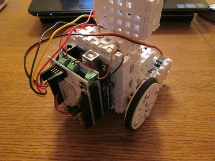
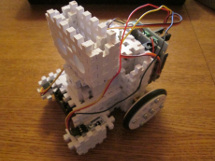
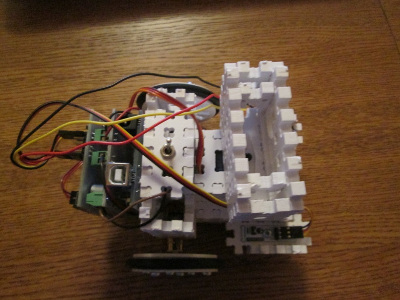
Так выглядит подопытная мышка после сборки.
Вот примерное описание «заготовки» для эксперимента. Материал для следующих статей уже есть. В них ожидается настройка моторов, головы, датчиков. Над великой программой робота «Следование по линии» только начинаю работать. Ждите мышу!
Комментарии
(0) Добавить комментарий