Ученица СУНЦ НГУ создала робота, лазающего по деревьям
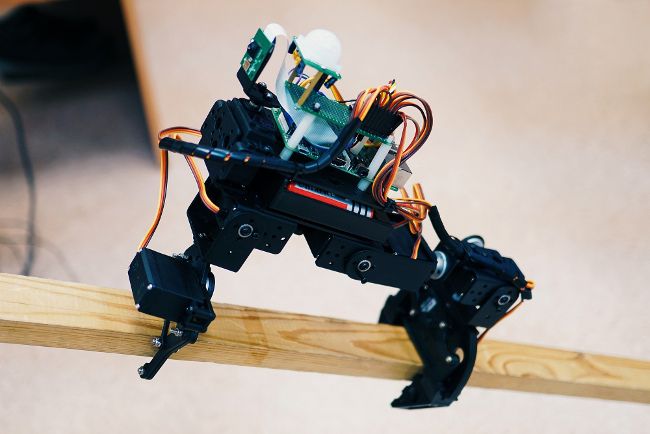
Существует много способов наблюдения за животными в естественных условиях (например, фотоловушки), Такие наблюдения помогают контролировать антропогенное влияние на среду их обитания. Однако большинство существующих способов наблюдения плохо подходят для работы на уровне крон деревьев. Для решения этой проблемы Дарья разработала автоматическое устройство, которое может цепляться за ветви деревьев специальными захватами (наподобие обезьяны) и перемещаться по ним, изгибаясь как гусеница.
— Такая идея возникла, когда я начала перебирать способы перемещения у роботов и сравнивать их с теми, которые придумала природа. Я обнаружила, что есть летающие, ходящие и ездящие роботы, а лазающих нет. И мне показалось, что для решения экологических проблем и изучения самих животных было бы правильно использовать принципы движения из мира природы, — рассказывает Дарья.
Чтобы определять свое положение в пространстве и реагировать на движение, робот оснащен датчиком инерциальной навигации (гироскоп, акселерометр, магнитометр, определяющий углы наклона и угол по компасу, и барометр для вычисления высоты относительно земли) и датчиком движения (срабатывает на изменение теплового потока, дальность 7 м). Для получения изображения в носу робота установлена поворотная камера, а для управления всеми устройствами используется бортовой компьютер. Вся конструкция робота собрана из легких алюминиевых деталей.
Программное обеспечение для бортового компьютера сделано по принципу сервер-клиент. На компьютере робота после загрузки операционной системы запускается программа-сервер, которая взаимодействует с ПО планшета или ноутбука человека, ведущего наблюдение (клиента). Компьютер робота настроен для работы как wi–fi точка доступа. В качестве сервера написана программа на языке Python, которая принимает и обрабатывает запросы от веб-браузера и при подключении клиента передает ему html-страницу с элементами интерфейса наблюдения и управления.
Сейчас робот умеет зацепляться за горизонтальные ветки и передвигаться вдоль них, может транслировать видео с камеры для человека-исследователя и работать в автоматическом режиме. При срабатывании датчика движения или обнаружения изменения в кадрах с камеры запускается подпрограмма распознавания животных. С помощью технологии компьютерного зрения робот может распознавать обезьян и лесных котов по крупным изображениям и сохранять всю информацию в базе данных на бортовом компьютере, предоставлять доступ к этой информации человеку через веб-интерфейс.
Проект Дарьи Королёвой вошел в число финалистов XVI Балтийского научно-инженерного конкурса. На прошлой неделе Дарья и ее научный руководитель преподаватель Лаборатории инженерного конструирования СУНЦ НГУ Александр Сергеевич Мальцев представляют работу в Санкт-Петербурге.
— В настоящее время основные проблемы, над которыми еще предстоит работать, — это перемещение по вертикальным ветвям и зацепление за широкий ствол дерева. Для решения этих проблем планируется попробовать новые устройства зацепления и, возможно, поменять конструкцию робота для уменьшения центра тяжести. Также в будущем планируется доработать систему распознавания животных, чтобы робот мог находить и узнавать их даже по небольшим силуэтам, — говорит Александр Сергеевич Мальцев.
В ближайших планах Дарьи и ее преподавателя — сделать 3D-модель крышки для защиты компьютера, датчиков и проводов от веток и погодных условий, распечатать ее на 3D-принтере, провести эксперименты с другими устройствами зацепления за дерево, подобрать и изготовить наиболее удачную их конструкцию. В дальнейшем Дарье также предстоит решить проблему быстрой разрядки аккумуляторов из-за постоянной работы мотора и компьютера.
Источник: СУНЦ НГУ
Комментарии
(0) Добавить комментарий