Студенты СГТУ разработали проект для управления движением колонны беспилотных автомобилей
Проект – это прототип, идеальный образ возможной реализации беспилотных транспортных средств в будущем. Он направлен на исследование беспилотных технологий и на разработку рабочего прототипа колонны беспилотных автомобилей. Проектная деятельность позволила изучить и опробовать на практике элементы, которые уже используются в существующих беспилотных автомобилях. Данное проектное обучение можно рассматривать как модель профессиональной проектной деятельности в области автоматизации.
В проекте приняли участие:
- Даниил Иванов, м1-ИКТС-11 – изучал и разрабатывал алгоритмы автономного перемещения мехатронных платформ, моделировал коммуникационное пространство, создавал и тестировал системы технического зрения;
- Дмитрий Родичев, б-УПТС-31 – разрабатывал алгоритмы управления, составлял центральный проект, подготавливал презентации;
- Андрей Масленников, м1-УПТС-11 – проектировал конструкции мобильных платформ, оснащал электроникой, составлял техническую документацию.
Распределение ролей позволило эффективно использовать время для работы над проектом и создало комфортную среду для плодотворной работы.
Даниил Иванов разработал систему технического зрения, благодаря которой робот распознает знаки дорожного движения и взаимодействует с различными цветными объектами, в том числе и светофором.
Андрей Масленников спроектировал и собрал мобильную платформу схожей конструкции с реальным автомобилем. Подобрал и установил необходимую электронику и произвел её коммутацию. Не мало времени уделил технической документации по проекту.
Дмитрий Родичев разработал алгоритмы движения и управления мобильной платформой, синхронизировал работу программного обеспечения с электронными средствами и видеокамерой. Объединил имеющиеся разработки в общий проект, составил презентацию и бизнес план проекта, успешно выступил на защите проекта в СГТУ.
Создание данной мобильной платформы входит в компетенцию «мобильная робототехника», которая способна объединить многие специальности, поскольку для робота важны такие комплексы, как системы управления, общая конструкция, программное обеспечение, всевозможные системы ориентации и навигации, системы распознавания и детектирования объектов, системы беспроводной связи. Именно поэтому очень важно работать сообща и грамотно корректировать общее направление проекта.
Цель проекта - создание и применение автономных технологий вождения в сфере служб доставки, сервисов такси и грузоперевозок, путём разработки автономных транспортных средств, которые будут перемещаться в колонне. Основной задачей проекта является разработка прототипов, действующих образцов техники. Их траектория движения будет согласованной, а сами платформы должны образовывать единую систему.
Актуальность проекта - автономные транспортные средства в колонне смогут экономить топливо. Благодаря подобным системам увеличатся объёмы и скорость перевозок, поскольку они способны поддерживать заданный темп и график. Такие транспортные колонны смогут осуществлять перевозки в тяжёлых и опасных для людей условиях.
Система информационного обеспечения – это система, которая обеспечивает сбор, первичную обработку и передачу в систему программного управления данных о состоянии внешней среды и функционировании узлов платформы. Оно определяет функциональные возможности мобильных платформ, уровень их адаптации к изменениям окружающей среды, эксплуатационную надежность и эффективность использования.
Основными факторами при проектировании платформы стали:
- надежность,
- прочность,
- относительная малогабаритность,
- безопасность.
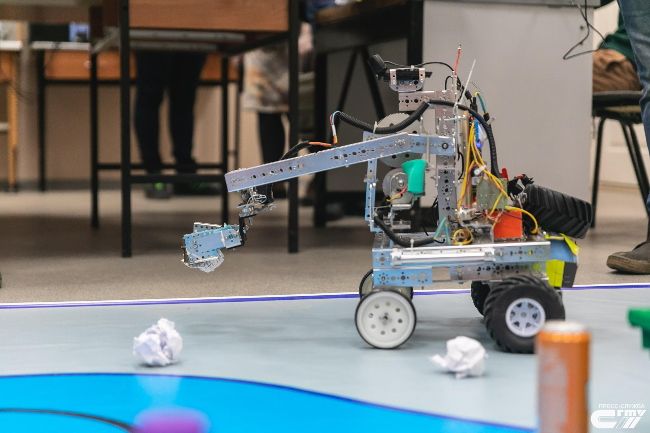
Поворотный двигатель размещен в передней части робота. Он соединяется с передней парой колес, тем самым образовывая рулевую трапецию. Для реализации идеи с соединением пары передних колес, было принято решение о расположении их относительно друг друга под углом (развал схождения), что привело к повышению параметра управляемости робота, и распределению веса в передней части робота.
Была спроектирована и собрана мехатронная платформа, которая по своей конструкции похожа на автомобиль, так же разработана система электронного управления. Робот «BAG-1» участвовал в региональных соревнованиях AutoNet 18+ весной 2020 года, на которых конструкция заняла 1 место. Робот автономно проехал участок трассы в соответствии с дорожными знаками. Помимо конкурса AutoNet, комплекс ПО тестировался на региональных соревнованиях в EcoNet 18+ и на профориентационном выступлении в городе Петровске. В них платформы «АТОМ» и «ТК-1» автономно собирали объекты разных цветов, а на выступлении в школе Петровска совершали манёвры в полуавтоматической колонне. Один робот был ведущем и управлялся в ручном режиме, второй робот следовал за ним автономно, используя комплекс систем технического зрения.
Саратовский государственный технический университет имени Гагарина. Ю.А. активно участвовал и сопровождал проект на различных этапах разработки, например, сварочные, токарные и фрезерные работы были выполнены в одной из лабораторий ИММ, благодаря лабораторным источникам питания проводились тестирования двигателей мобильной платформы, а качество организации и проведения данных конкурсов и мероприятий позволило максимально сконцентрироваться при защите проекта в стенах научно-технической библиотеки СГТУ.
Дальнейшее развитие проекта состоит в сборке двух и более платформ, разработке новых алгоритмов и объединение платформ в единую транспортную систему. Планируется участие в различных конкурсах, мероприятиях и мастер-классов на площадках СГТУ имени Гагарина Ю.А.
Комментарии
(0) Добавить комментарий