Проект Самарского политеха запущен на краудфандинговой платформе
Пока удалось изготовить и протестировать первые две конструкции. Недавно ученые придумали новую и более сложную модель – Бипед. Собранные на платформе Planeta.ru средства пойдут на изготовление ее тестовой версии.
– Все началось с того, что нам удалось придумать совершенно новую схему преобразования вращательного движения в шаг. Она лежит в основе всех наших моделей, – рассказывает доцент кафедры «Инновационное проектирование» факультета дизайна Антон Раков. – Управление шагоходми может быть механическим, проводным или беспроводным.
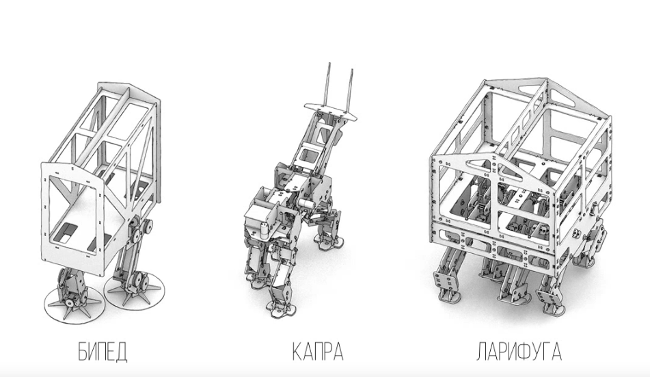
Ларифуга – прототип ходячего офиса или основа будущей гелиолитографической лаборатории для строительства на Луне. Управление может осуществляться с помощью перчатки-джойстика, разработанной студентом четвертого курса института автоматики и информационных технологий Артемом Бражниковым. Ларифуга принимала участие в XIX Всемирном фестивале молодежи и студентов в Сочи, Kazan Startup Weekend 2017, Open Space Market в Казани, проекте «Город роботов», научно-популярном проекте «Парк науки» и др. Британский таблоид Daily Mail сравнил эту модель ходячей архитектуры с избушкой Бабы-Яги.
Бипед – тоже ходячий офис, но только на двух ногах. Разработчики в шутку называют модель современной избушкой.
Капра – дистанционно управляемый квадропод. Белая техно-коза, по замыслу разработчиков, олицетворяет Самару современную, технологичную. Робот оснащен тремя двигателями: первый обеспечивает движение козы вперед-назад, второй отвечает за поворот корпуса, третий поднимает и опускает голову и рога. Управляется «Альба Капра» дистанционно с мобильного телефона при помощи специально разработанного приложения. Робот передвигается со скоростью 2-3 километра в час, заряда аккумулятора хватает на 30-40 минут непрерывной ходьбы.
Модели создаются междисциплинарными проектными командами Самарского политеха. По словам Антона Ракова, участие в разработке подобных «игрушек» – отличная возможность для студентов изучить основы робототехники и в дальнейшем перейти к работе над более сложными технологическими проектами.
По информации пресс-службы Самарского политеха.
Комментарии
(0) Добавить комментарий