Победоносный проект команды ФМЛ №239 на WRO 2016
Руководитель проекта Сергей Филиппов поделился с нами своим впечатлением о самой олимпиаде: "Это весьма крупное мероприятия: более 50 стран, более 2000 участников, все победители национальных этапов. Очень дружественные отношения, масса позитивных впечатлений. Интенсивная многомесячная подготовка и три дня тяжелого труда на олимпиаде принесли свой результат. Сборная России выступает дружно, все друг друга поддерживают. Привезли 4 медали".
Про актуальность, цели и задачи проекта можете ознакомиться здесь.
Подробнее о проекте:
Конструкция
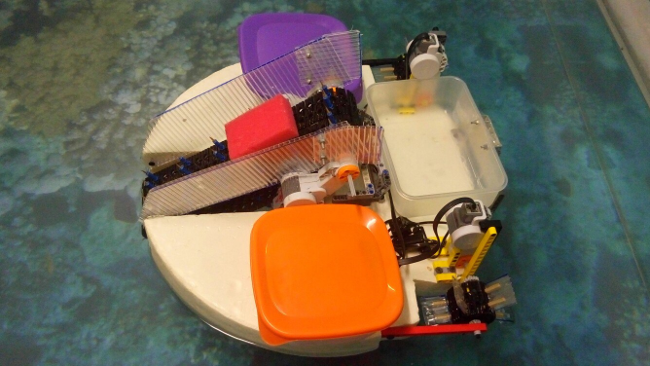
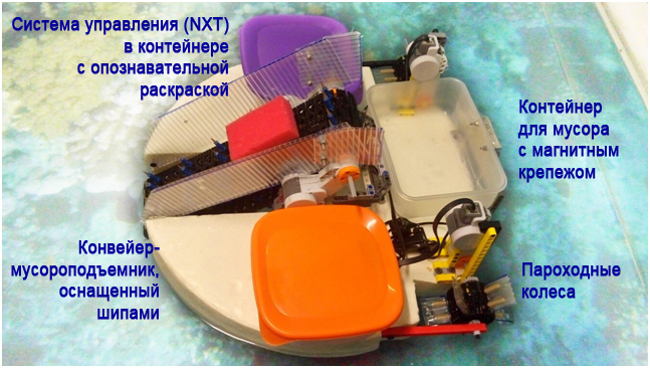
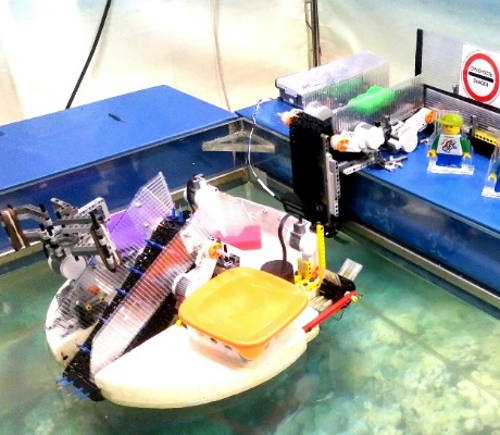
Робот-сборщик мусора, автоматизированный подъемник и конвейер собраны из конструктора Lego Mindstorms NXT с применением дополнительных материалов.
В конструкцию робота-сборщика входят следующие элементы:
- плавучая платформа,
- пароходные колеса,
- конвейер-мусороподъемник на гусеничных элементах EV3, оснащенный шипами для зацепления мусора (зубочистки, закрепленные в штифтах),
- съемный резервуар для загрузки мусора с магнитным крепежом,
- система управления, помещенная в защищенный от влаги контейнер,
- метки с опознавательной раскраской для обеспечения позиционирования робота.
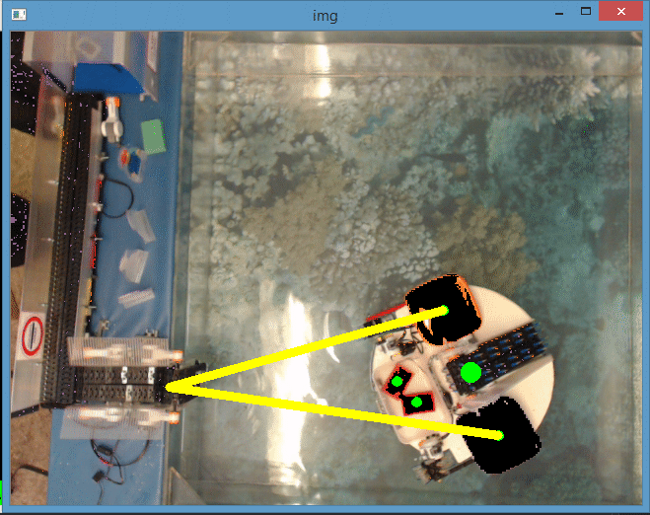
На берегу расположен причал, на который выгружается собранный мусор. При швартовке съемный резервуар с помощью мощного магнита скрепляется с подъемником и выгружается на ленту транспортера. По конвейеру мусор поступает в зону последующей переработки. Резервуар возвращается на робота-сборщика.

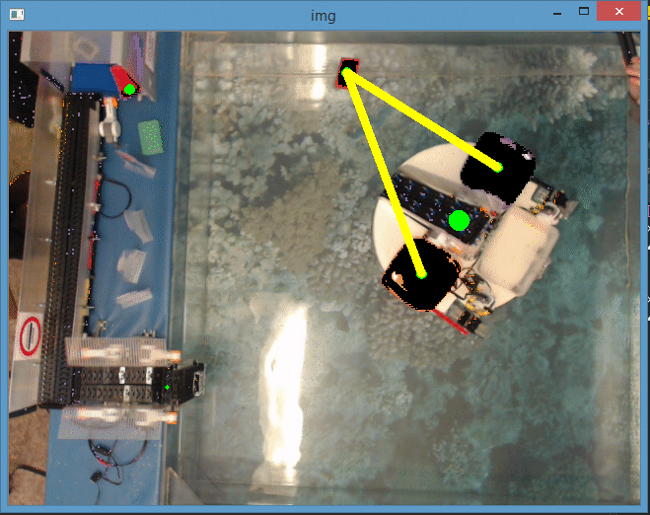
Для определения положения всех частей системы использована камера Logitech c920, расположенная сверху над полигоном.
Список использованного оборудования:
- Конструктор Lego Mindstorms NXT - 3 шт.
- USB-камера Logitech c920 - 1 шт.
- Аквариум 120х120х45 см - 1 шт.
Алгоритмы и программное обеспечение
- Программа на контроллере NXT управляет движением робота-сборщика по воде и подъемом найденного мусора.
- Программа на контроллере NXT управляет гусеничным подъемником и первым конвейером на причале.
- Программа на контроллере NXT управляет вторым конвейером на причале.
- Программа на компьютере обрабатывает информацию с видеокамеры, связывает всех роботов по bluetooth в реальном времени и отправляет им специальные сигналы для управления скоростью вращения моторов.
Элементы технического зрения
В программе на компьютере применены элементы технического зрения:
- Поиск компонент связности.
- Выделение наибольшей компоненты, избавление от помех.
- Определение центра масс компоненты.
- Нахождение координат центра робота.
- Нахождение угла направления на искомый объект.
- Настройка регулятора движения по направлению и скорости.
- Фиксация на искомом объекте, отсев помех за пределами заданной окрестности.
В режиме швартовки:
- Движение к виртуальной точке напротив причала для подъезда робота к причалу нужной стороной.
- Плавное приближение к причалу до фиксации магнита.
- Отъезд от причала после выгрузки.
Компьютер отправляет роботу по каналу Bluetooth команду плыть к месту нахождения мусора (по координатам робота и мусора).
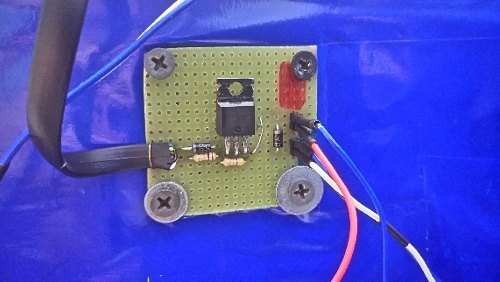
Так как мощности драйвера мотора NXT недостаточно для работы электромагнита, мы используем ключ на n-канальном полевом транзисторе (MOSFET) и дополнительный мощный источник питания.

Проблема сбора и утилизации мусора является очень актуальной для людей. Все мы хотим жить в чистом мире, пить чистую воду, дышать свежим воздухом.
Для подъема затопленных объектов, содержащих опасные химические элементы роботы особенно необходимы. Мы собрали робота из Лего конструктора и поместили в напечатанный на 3D принтере корпус.
Сальники сделаны с использованием Лего втулок и осей с автомобильными прокладками, загерметизированными техническим вазелином.
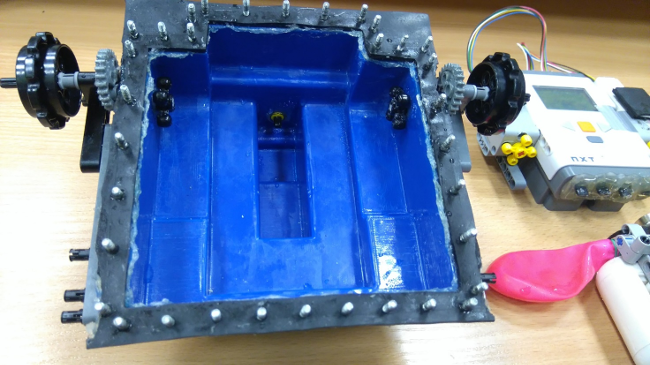
Подъем отравляющих веществ в затопленных контейнерах осуществляется с помощью механизма надувных понтонов. Это известная практика в мире. У нас весь процесс делают роботы.
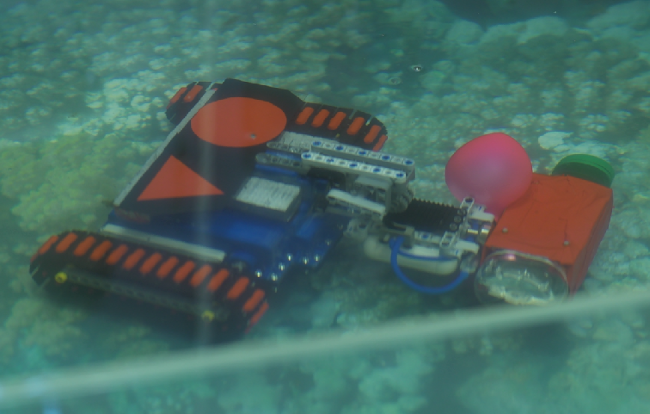
На специальной платформе, которую можно установить, как на берегу, так и на корабле-пароме, подводный робот OWC-S (submarine)-2016 опускается рядом с местом захоронения опасных веществ.
При изготовлении платформы мы вынуждены были отказаться от NXT моторов и установить более мощные моторы из конструктора Tetrix, который совместим с Лего NXT и управляется специальным адаптером от HiTechnic.
На фотографии подводный робот подходит к месту нахождения опасного объекта и присоединяет к нему с помощью магнита надувающийся понтон. Для надува понтона использована пневматика Лего.
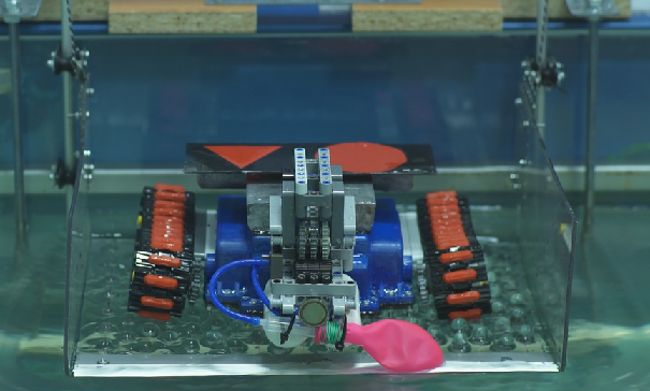
OWC-2016 получает из коммуникационного центра сигнал, что объект поднят с помощью понтонов и должен быть доставлен на базу. OWC-2016 находит по переданным из центра координатам поднятый объект (в нашем случае роль центра выполняет камера, установленная над аквариумом). После того, как захват произведен, объект буксируется для подъема.
Фрагмент программы

Кликните для увеличения
Программное обеспечение
Среда программирования RobotC 3.62.
Среда программирования Microsoft Visual Studio 2015 for Windows Desktop.
Авторы проекта
Городов Михаил, Глушковский Лев, Кудряков Дмитрий
Руководители проекта
Филиппов Сергей Александрович, Никитин Денис Александрович, Хартанен Александр Вячеславович, Фокин Иван Максимович
Ассистент
Городова Александра Олеговна
Наша редакция поздравляет команду Президентского ФМЛ №239 с победой на WRO 2016!!!
Комментарии
(1) Добавить комментарий