Обзор VRBOT-D1

Наша редакция поздравляет ребят с отличным выступлением! А также благодарит группу Вконтакте Dobot RUS за предоставленный обзор.
Введение
VRBOT-D1 - это обучающая платформа робота начального уровня, совместимая с Arduino, рожденная для обучения искусственному интеллекту. Dobot Share Creating Pleasure совместно с партнером CoSpase Robot в этой модели объединили виртуальную и дополненную реальность с такими важнейшими понятиями, как Интернет вещей, робототехника, вычислительное мышление, НТИИМ (Наука, Технология, Инженерия, Искусство и Механика). Это ведущая платформа для учащихся начальных и средних школ, а также университетов и колледжей. Платформа основана на теории цифрового бизнеса, где конечной целью является соединение людей, машин и объектов друг с другом как в физическом, так и в виртуальном мире. VRBOT-D1 может принимать участие в CoSpace Rescue Challenge и CoSpace Logistics Challenge, где соревнуются участники из более чем 20 стран.
Комплектация набора
- DoDuino Mega 2560
- Разнообразные сенсоры (Ультразвуковые(x3),цвета(x2),инфракрасный, геомагнитный датчики, датчик освещения)
- DC редукторные моторы (x2)
- Литий-ионные аккумуляторы типа 18650(x2)
- Провода:
x3 4PIN провода для соединения ультразвукового датчика
x2 6PIN провода для соединения датчика цвета
x1 8PIN провод для соединения трекинг модуля
x2 6PIN провода для соединения моторов - Инструкция
- USB – кабель
- Алюминиевый корпус
- Колеса(x2)
- Отвертка
- Набор шурупов и закрепок
- Платформа для перевозки кубиков
Технические параметры
| Параметр | Описание |
|---|---|
| Рабочие напряжение | 7,4 В |
| Плата управления | DoDuino Mega 2560 |
| Микропроцессор | ATmega 2560 |
| Батарея | Литий-ионные аккумуляторы типа 18650 |
| Ультразвуковой диапазон измерения | 3мм-1000мм |
| Размер модели | 195мм x 172мм х 79мм |
| Вес модели | 810 г |
| Максимальная нагрузка | 500 г |
| Диаметр колес | 67мм |
| Оптимальная температура окружающей среды | 0 С - 40 С |
| Программное обеспечение | CoSpaсe Challenge platform, Arduino IDE, Mixly |
| Коммуникационный интерфейс | USB/XBEE/Serial |
| Датчики | Ультразвуковые(x3),цвета(x2),инфракрасный, геомагнитный датчики, датчик освещения |
| Параметры двигателя | Коэффициент уменьшения: 48:1 Напряжение: 7В Ток холостого хода: 700мА Максимальная скорость оборота: 200 об/мин Коэффициент разрешения кодировщика:585 импульсов/об |
Описание работы некоторых систем
Мы программировали свою модель с помощью среды «Arduino IDE». Если вы программируете с помощью среды «Mixly», то некоторые порты и возможности платы вашей модели будут закрыты для вас, но зато программировать будет намного проще и понятней детям. Код практически не отличается.
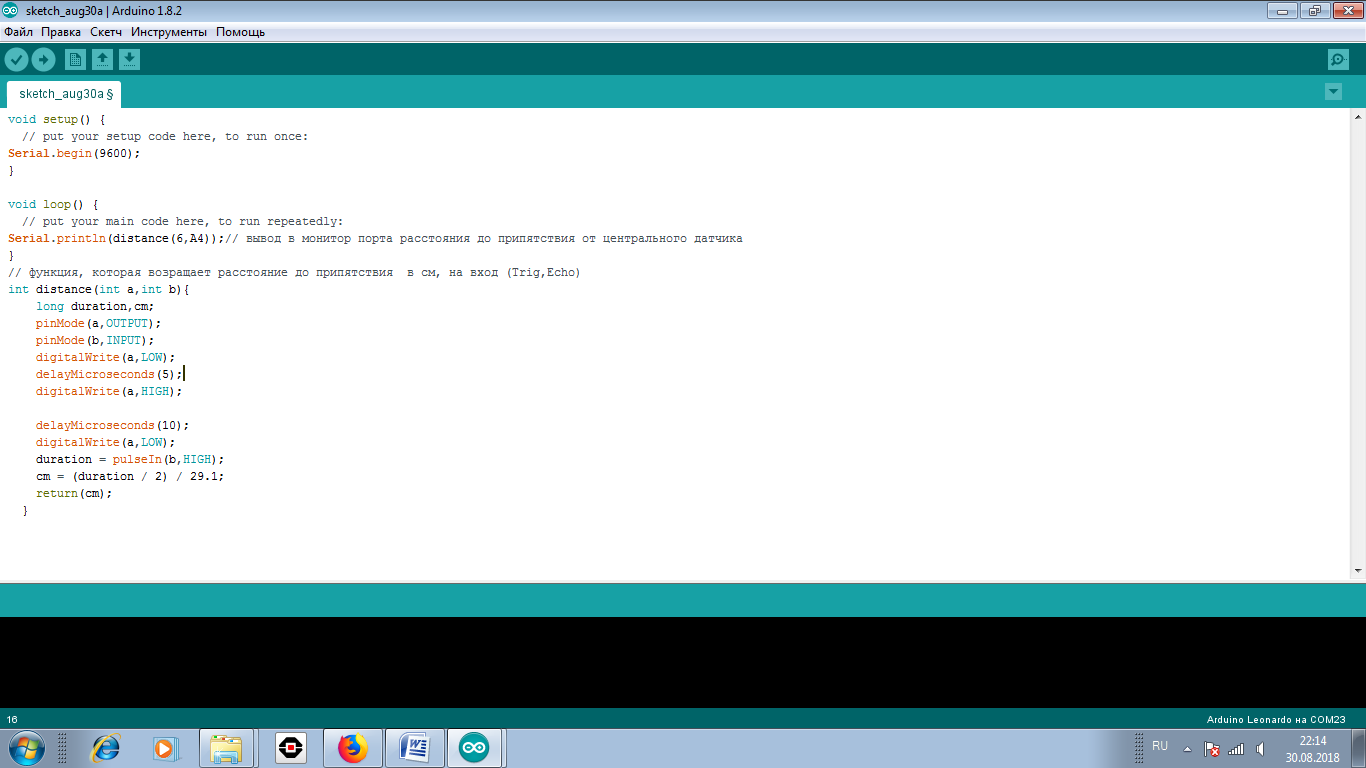
1. Датчики цвета
Порты в плате:
левый: 18(out)А11(s2) А10(s3) А9(led)
правый: 19(out) 30(s2) 31(s3) 32 (led)
Очень чувствителен к освещению, по причине чего часто сбивается в определении цвета и часто придется менять диапазоны определения цветов либо делать их слишком большими (как сделали мы), что удобно при определении не большого количества цветов.
Пример:
Кликните для увеличения
2. Моторы
Порты в плате:
левый: 9(вперед),8(назад),3 и 2(Энкодоры)
правый: 10(вперед),5(назад),21 и 20(Энкодеры)
Мотор включается обычной подачей на него напряжения (можно использовать как аналоговый и тем самым регулировать скорость).
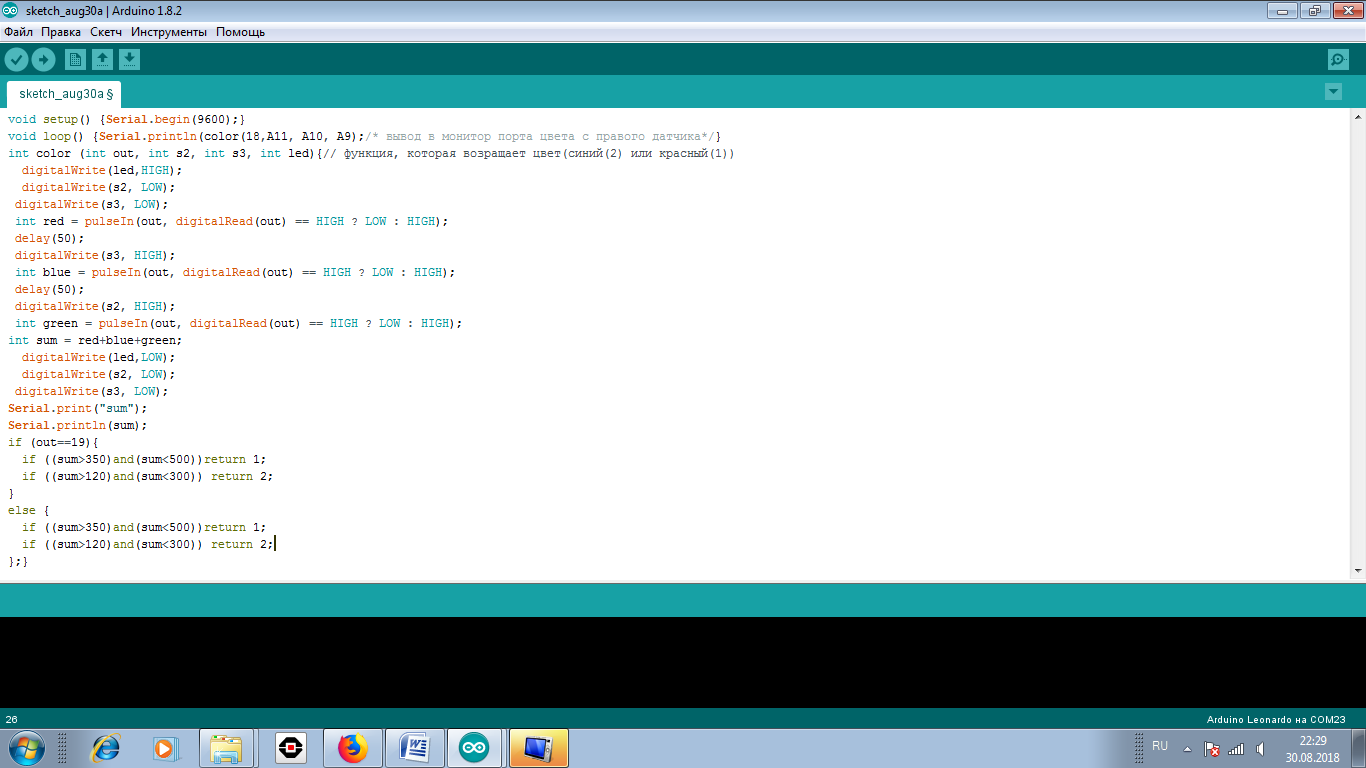
3. Ультразвуковые датчики
Порты в плате:
-левый: А2(Echo);46(Trig);
-центральный: А4(Echo);6(Trig);
-правый: А3(Echo); А5(Trig);
Пример:
Кликните для увеличения
4. Инфракрасный датчик (цифровой)
Порты в плате: 25-29, 39(s1-s6)
На самом сенсоре можно наблюдать лампочку над каждым датчиком (горит- передает 0).
Пример:
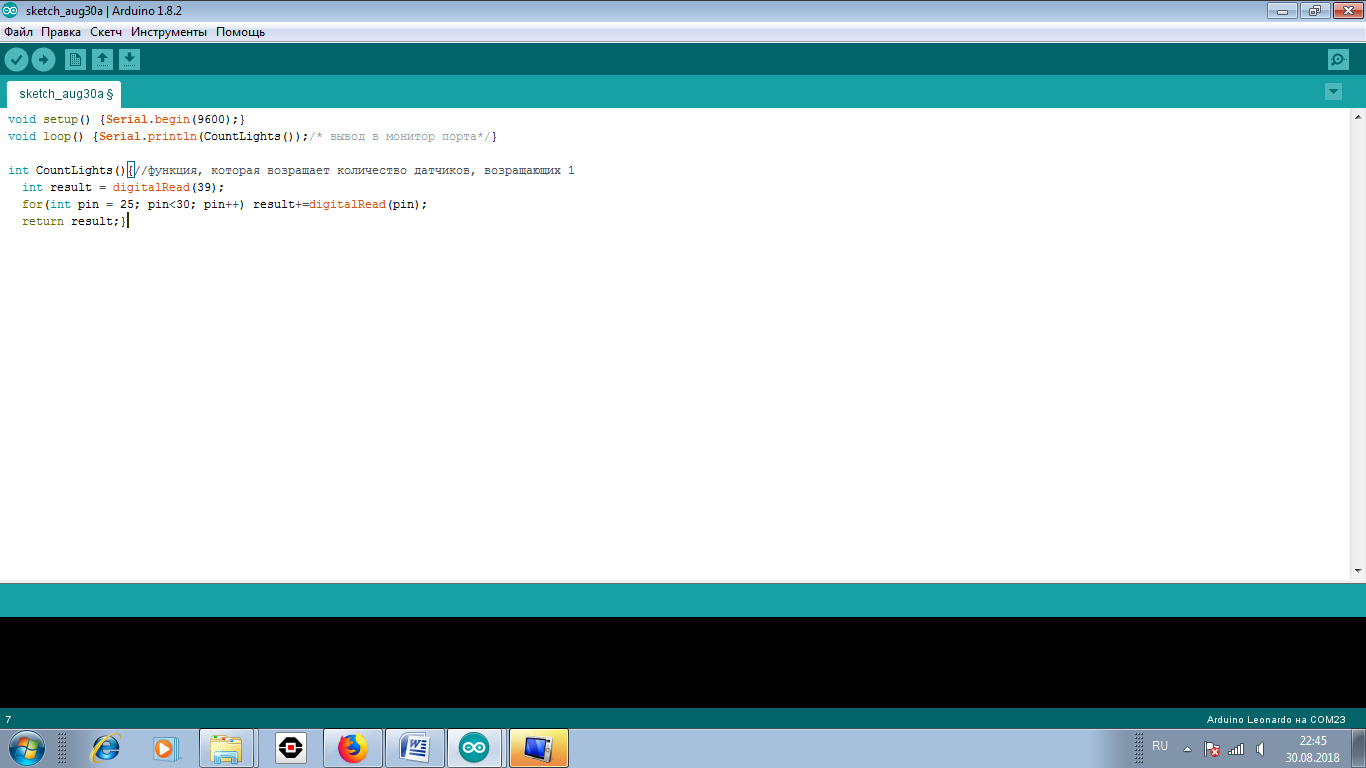
Кликните для увеличения
5. Геомагнитный датчик
6. Датчик освещения (фоторезистор)
Порты в плате: A8
7. Пьезоизлучатель
Порты в плате: 11
8. Кнопки
Порты в плате:
-А:35
-В:36
-С:37
Четвертая кнопка для включения/отключения подачи питания на плату от аккумуляторов.
Сборка
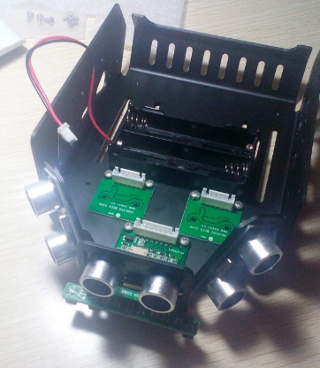
Картинка 1. Прикручены датчики цвета, инфракрасный и ультразвуковые датчики расстояния, а также отсек для аккумуляторов.

Картинка 2. Универсальное колесо
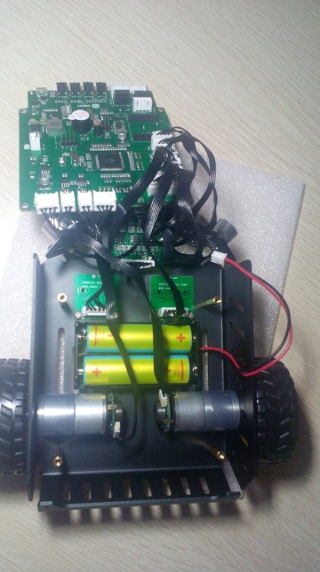
Картинка 3. Прикручены колеса, двигатели, все подсоединено к основной плате
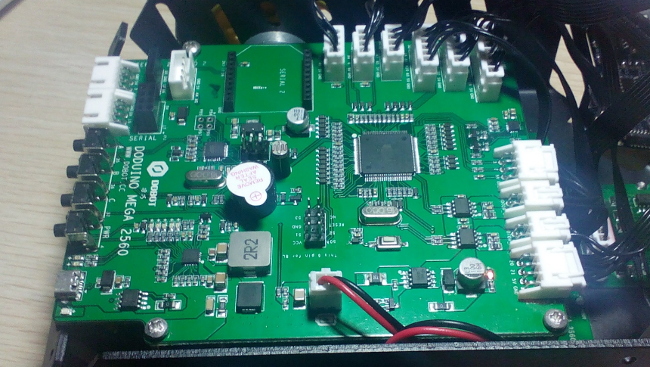
Картинка 4. Плата.
Правый нижний угол – выходы от мотора.
Правый верхний – датчики.
Левая сторона – 2 serial, 4 кнопки, usb.

Картинка 5. В собранном виде
Производитель: Dobot Share Creating Pleasure
Возможно полезные ссылки:
http://www.sang-nila.com/vrbot-d1/
https://www.dobot.cc/products/dobot-ai-starter-overview.html
http://cospacerobot.org
Авторы обзора: Егор Сдержиков и Дмитрий Оконешников из лицея № 22 «Надежда Сибири», Элина Аллаярова и Александр Гемуев из гимназии №17 Новосибирска.
Комментарии
(2) Добавить комментарий