Изготовление робота-сумоиста на печатной плате
В этом состязании участникам необходимо подготовить автономного робота, способного наиболее эффективно выталкивать робота-противника за пределы ринга. Соревнования сумоистов делятся на несколько категорий, различающиеся по размерам и весовым категориям. В категории мини-сумо размер роботов не должен превышать 10х10 см в стартовом состоянии, вес не более 500 г. Не ограничена стартовая высота робота, поэтому создание робота-сумоиста - посильная задача, и именно поэтому данная номинация одна из самых популярных.
Мы в ЦТПО МИРЭА пришли к следующей концепции робота-сумоиста. Несущим основанием робота является односторонняя печатная плата, на которой выполнены все электрические соединения. Причем токопроводящие дорожки расположены снизу робота, а все навесные элементы - сверху. Печатная плата позволяет избавиться от соединительных проводов, одновременно являясь структурным основанием робота. Навесной монтаж нами забракован и отброшен по следующим причинам. Прежде всего, соединительные провода занимают место. При использовании печатного монтажа все электрические соединения расположены в слое 1-3 мм. Печатный монтаж более надежен: сделанное один раз электрическое соединение прослужит ни один турнир. Соединительные провода очень часто обрываются и отсоединяются, особенно при низком качестве исполнения. Третий плюс уже упоминался - печатная плата является одновременно и рамой робота, к которой крепятся моторы с колесами, крышка и отвал. Недостаток печатного монтажа тоже вполне очевиден - невозможность изменить компоновку робота. Если будет необходимо установить дополнительный датчик, или изменить местоположение одного из датчиков - печатную плату необходимо будет делать заново.
Печатная плата разрабатывается в специализированных САПР-пакетах, таких как Sprint-Layout. Прежде всего, создается виртуальная заготовка печатной платы. Размеры робота в этой номинации ограничены 100х100 мм, поэтому и размеры заготовки не должны превышать этих габаритов. На заготовке необходимо предусмотреть вырезы для колес в задней части робота, а так же запас свободного места для отвала (ковша). Таким образом, заготовка будет иметь Т-образную форму.
Следующий шаг - размещение на плате вашего набора датчиков. Фронтальные датчики робота следует отодвинуть вглубь робота, иначе будут сложности с ковшом. Далее необходимо предусмотреть крепления для электромоторов. Мы используем П-образные крепления, изготовленные на 3d-принтере. Электромотор фиксируется внутри такого крепления, и с помощью болтов фиксатор соединяется с печатной платой. Отверстия под эти болты и нужно предусмотреть на плате.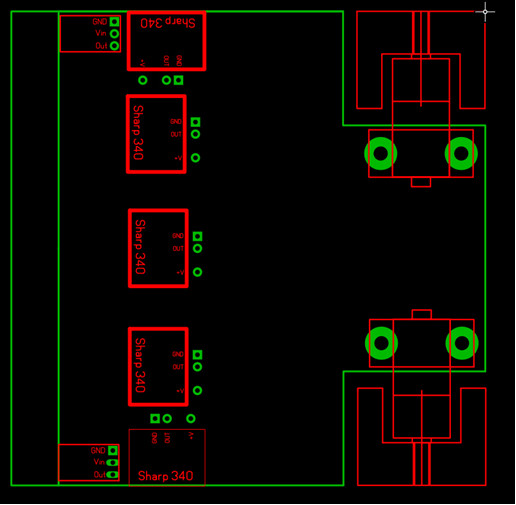
Рис. 1. Заготовка печатной платы в Sprint-Layout с размещенными датчиками и фиксаторами для электромоторов. Сами электромоторы и колеса робота схематически начерчены в красном слое.
Далее на печатной плате необходимо разместить все необходимые электрические элементы: стабилизатор питания, тумблер включения питания, разъемы для подключения контактов электромоторов, микроконтроллер, драйвер двигателей. Все эти компоненты отсутствуют в стандартном наборе макросов, поэтому каждый элемент необходимо обмерить, разметить и занести в пользовательские макросы. Это очень ответственная процедура, здесь нужно руководствоваться правилом "семь раз отмерь, один раз отрежь".
При размещении на заготовке микроконтроллера следует помнить о usb-разъеме или разъеме программатора. Не забываем так же разместить отверстия для крепления ковша.
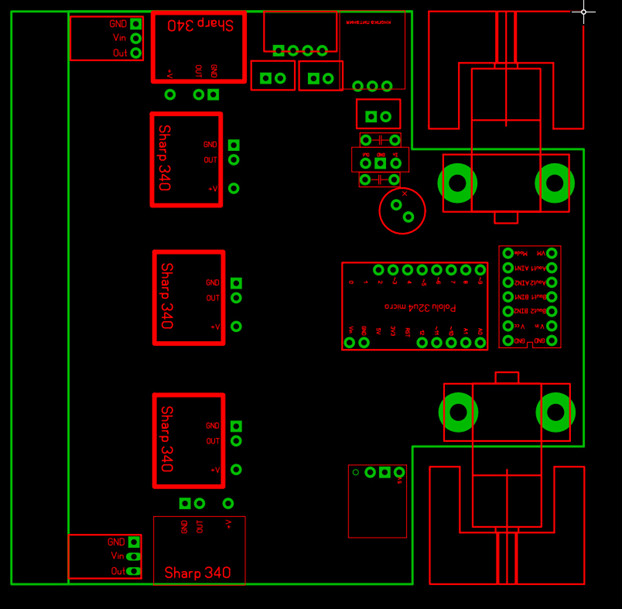
Рис.2. Заготовка в Sprint-Layout с размещенными электрическими компонентами. Неиспользуемые контакты микроконтроллера можно просто удалить. Такие компоненты как тумблер питания и разъем подзарядки следует располагать на краю платы, чтобы к ним был свободный доступ. Так же не забываем о доступе к usb-разъему микроконтроллера.
Далее проводятся токоведущие дорожки. Ширина дорожки определяется используемой технологией изготовления платы. Мы используем технологию ЛУТ, ширина токоведущей дорожки - 0.6 мм, расстояние между дорожками не менее 0.3 мм. Диаметр контактной площадки 2.0мм. При необходимости контактная площадка подрезается в овальную форму. Если возникла необходимость установки перемычки, лучше ее реализовать с помощью SMD-резистора сопротивлением 0 Ом.
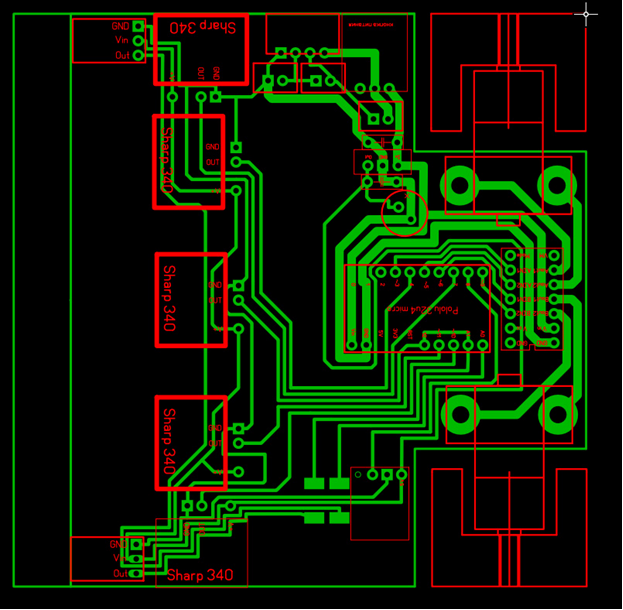
Рис.3. Готовая к печати заготовка в Sprint-Layout.Контактные площадки у левого датчика линии подрезаны в овальную форму так, что между ними остается место для одной дорожки. Большие площадки перед стартовым модулем предназначены для установки SMD-перемычек.
После этого плата изготавливается по технологии ЛУТ или по фоторезистивной технологии. На готовой печатной плате сверлятся необходимые отверстия и устанавливаются все электрические элементы. Установку драйвера двигателей и микроконтроллера лучше проводить по схеме гнездо-вилка. В случае необходимости, микроконтроллер можно будет легко демонтировать.
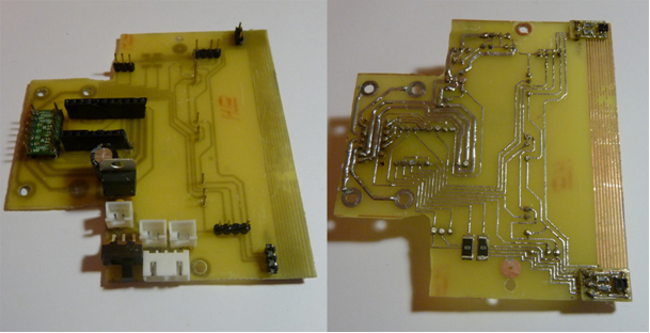
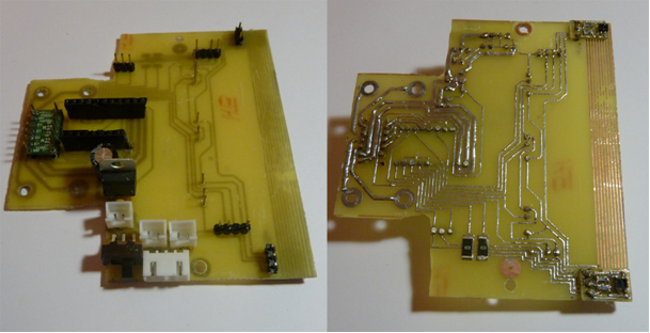
Рис. 4. Изготовленная по технологии ЛУТ печатная плата с напаянными компонентами. На этом роботе датчики линии расположены на отдельных маленьких платах, которые соединяются с основанием через отверстия. Будет целесообразно устанавливать такие датчики поверхностным монтажом.
Аккумуляторные батареи подключаются только через разъем. Это соединение должно быть разборным. Контакты электродвигателей тоже лучше соединять с платой через разъем. Когда все электрические компоненты установлены, можно провести первое включение робота и проверить работу датчиков и моторов.
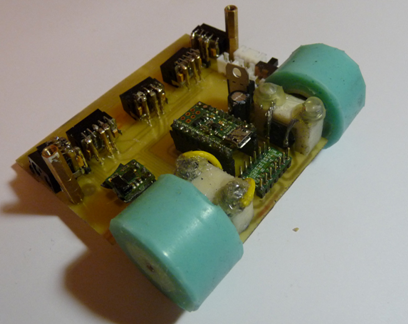
Рис. 5. Готовый к включению робот. Рекомендуется перед подключением аккумуляторных батарей проверить все соединения тестером. Барьерные дальномеры Sharp 340 установлены по схеме гнездо-вилка с целью обеспечения ремонтопригодности. Стартовый модуль так же съемный.
Далее из подручных материалов изготавливаем крышку-отвал. Наиболее удобный материал – листовая жесть толщиной 0.5 мм. Жестяные листы легко режутся ножницами по металлу, легко сверлятся, и в них легко проделать прямоугольные окошки под датчики. Крышка соединяется с платой через шестигранные латунные стойки для печатных плат, достаточно всего двух точек крепления. Основное назначение крышки – защита внутренностей робота от ударов, падений и чужих глаз.
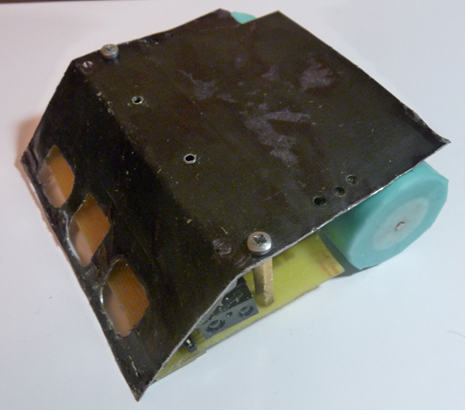
Рис. 6. Робот с установленной крышкой, изготовленной из 0.5мм жести. Печатный монтаж позволяет экономить очень много места. Высота данного робота – 36 мм
Технически робот готов. Однако необходимо выполнить одну очень важную операцию. Дорожки печатной платы располагаются снизу робота. В случае если робот соперника подцепит на свой металлический ковш вашего робота, может произойти короткое замыкание. Внизу голые электрические контакты, в том числе от аккумуляторных батарей. Привинтивная мера - покрыть плату электроизоляционным лаком в 2-3 слоя. Более надежное решение - закрыть токопроводящие дорожки толстой полиэтиленовой пленкой. Остроторчащие контакты рекомендуем подточить надфилем.
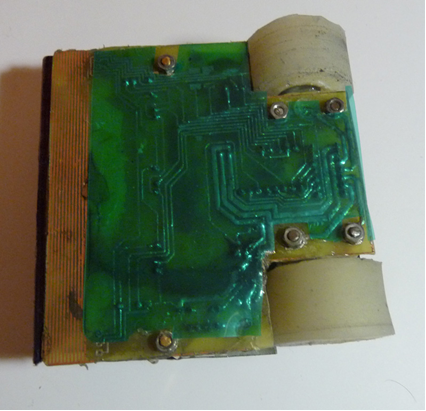
Рис. 7. Электроизоляция робота обеспечена с помощью толстой полиэтиленовой пленки, вырезанной по форме печатной платы. Пленка крепится к плате с помощью обычного термоклея.
Осталось только написать программу управления роботом. Роботы, выполненные на печатной плате, как правило, более конкурентоспособны, т.к. позволяют разместить более широкий набор датчиков, вплоть до кругового обзора. Надежность и стабильность поведения таких роботов на порядок выше, чем у сумоистов, выполненных навесным монтажом. Свободное место внутри робота допускает некоторые вольности с размещением балласта и положением центра тяжести робота.
Комментарии
(0) Добавить комментарий